|
Hi, I'm Mitsuhiko! I am a fourth-year CS Ph.D. student in the Berkeley Artificial Intelligence Research (BAIR) Lab at UC Berkeley, advised by Professor Sergey Levine. My research goal is to develop algorithms that empower robots with both high-level dexterity and generalization capabilities, and to incorporate them into everyday life. To this end, my research interests focus on data-driven approaches to solving real-world robotic tasks, including topics such as offline reinforcement learning (RL), online RL fine-tuning, and imitation learning. Recently, I have been particularly interested in how to use RL to quickly improve pre-trained generalist robot policies in test environments. I had a great opportunity to spend time as a research intern at TRI in Cambridge, MA (2025.06-2025.08) and at Google DeepMind in London, UK (2025.09-2025.12). Prior to Berkeley, I received my bachelor's degree from University of Tokyo in March 2022. Email / Google Scholar / GitHub / Twitter / Talks |

|
|
|
* denotes equal contribution, † denotes core contributor |
|
Andrew Wagenmaker†, Mitsuhiko Nakamoto†, Yunchu Zhang†, Seohong Park, Waleed Yagoub, Anusha Nagabandi, Abhishek Gupta†, Sergey Levine†. CoRL 2025 (Oral Presentation, Best Paper Award Nomination) arxiv link / project page / code We propose DSRL (Diffusion Steering via Reinforcement Learning), a sample-efficient and lightweight approach for improving pre-trained diffusion- or flow-based policies by steering the initial noise input through RL. We successfully demonstrate real-world RL-based fine-tuning of Pi-0, a pre-trained generalist policy from Physical Intelligence. |
|
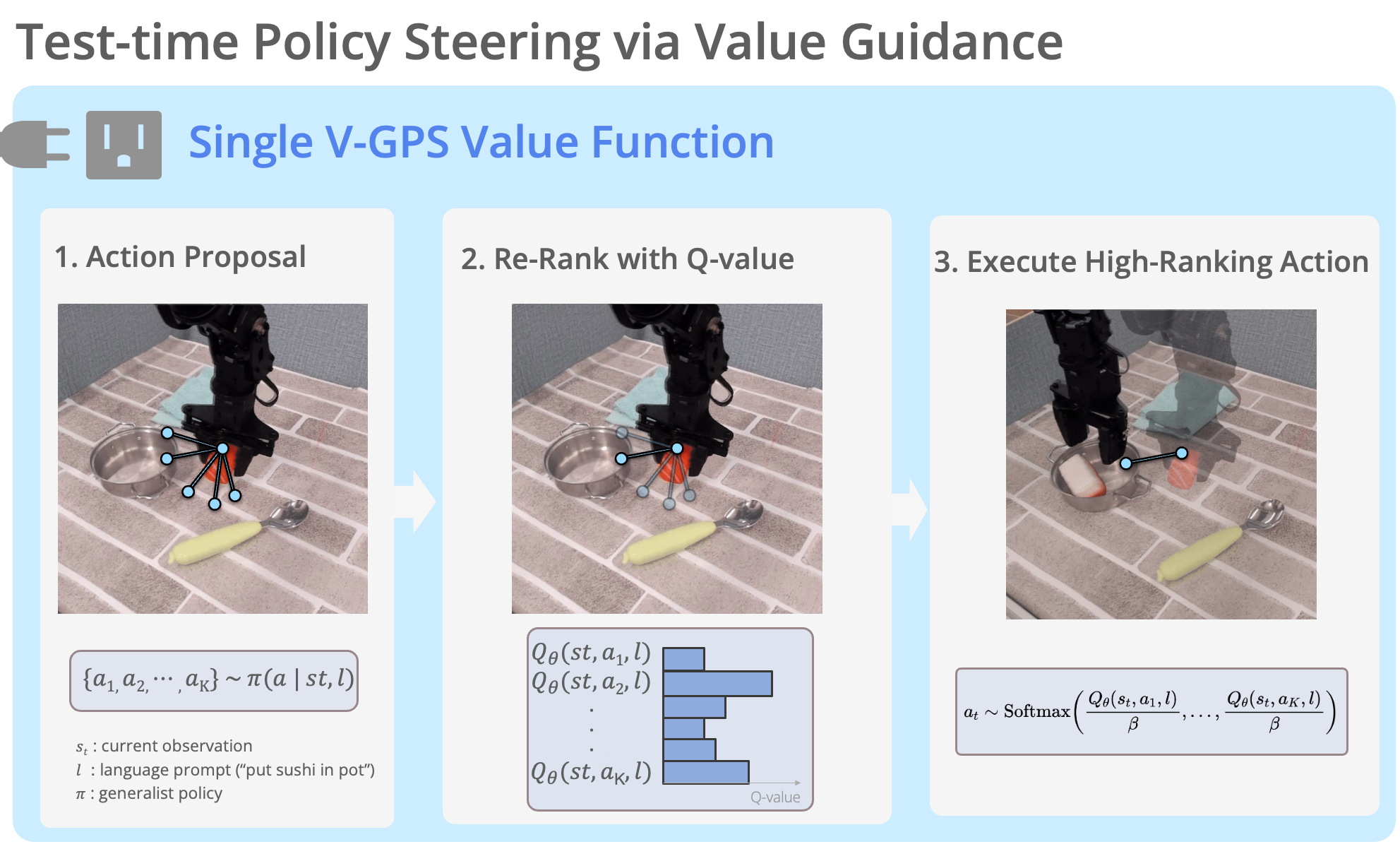
Mitsuhiko Nakamoto, Oier Mees, Aviral Kumar, Sergey Levine. CoRL 2024 arxiv link / project page / video / code We propose V-GPS (Value-Guided Policy Steering), a general and broadly applicable approach that enhances the performance of pre-trained generalist robot policies at deployment time by re-ranking their actions according to a value function learned via offline RL. |
|
Kevin Black*, Mitsuhiko Nakamoto*, Pranav Atreya, Homer Walke, Chelsea Finn, Aviral Kumar, Sergey Levine. ICLR 2024 arxiv link / project page / code We propose SuSIE (Subgoal Synthesis via Image Editing), a method that leverages text-to-image diffusion models (Stable Diffusion, InstructPix2Pix) for zero-shot robot planning. |
|
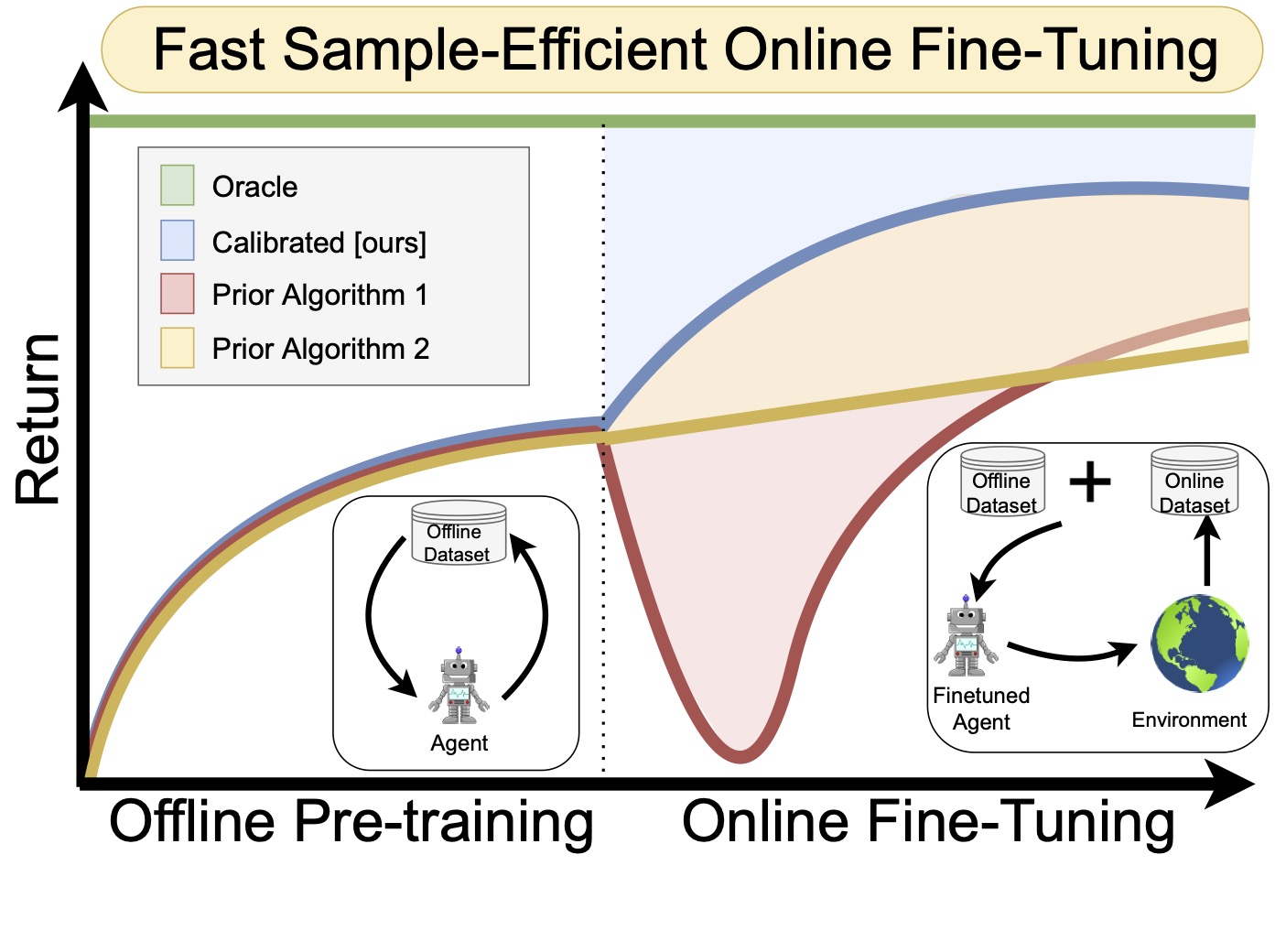
Mitsuhiko Nakamoto*, Yuexiang Zhai*, Anikait Singh, Max Sobol Mark, Yi Ma, Chelsea Finn, Aviral Kumar, Sergey Levine. NeurIPS 2023 arxiv link / project page / video We propose calibrated Q-learning (Cal-QL), a method for acquiring an offline initialization that facilitates online fine-tuning. |

|
Aviral Kumar*, Anikait Singh*, Frederik Ebert*, Mitsuhiko Nakamoto, Yanlai Yang, Chelsea Finn, Sergey Levine Robotics: Science and Systems (RSS) 2023 arxiv link / project page |
|
S.Katsushika, S.Kodera, M.Nakamoto, K.Ninomiya, N.Kakuda, H.Shinohara, R.Matsuoka, H.Ieki, M.Uehara, Y.Higashikuni, K.Nakanishi, T.Nakao, N.Takeda, K.Fujiu, M.Daimon, J.Ando, H.Akazawa, H.Morita, I.Komuro. In Circulation Journal, 2021 paper link |
|
S.Sawano, S.Kodera, S.Katsushika, M.Nakamoto, K.Ninomiya, H.Shinohara, Y.Higashikuni, K.Nakanishi, T.Nakao, T.Seki, N.Takeda, K.Fujiu, M.Daimon, H.Akazawa, H.Morita, I.Komuro. In Journal of Cardiology, 2021 paper link |
|
H.Shinohara, S.Kodera, K.Ninomiya, M.Nakamoto, KS.Katsushika, A.Saito, S.Minatsuki, H.Kikuchi, A.Kiyosue, Y.Higashikuni, N.Takeda, K.Fujiu, J.Ando, H.Akazawa, H.Morita, I.Komuro. In PLOS ONE, 2021 paper link |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I am from Yokohama, Japan. My name in Japanese is 中本光彦. During my free time, I enjoy playing and watching sports, especially soccer. I also enjoy playing Japanese chess (aka Shogi). |
|
|